距離検出の原理
レーザスキャナは、人の目には見えない赤外線レーザを用いて人を検出するのが一般的です。レーザスキャナ本体から投光されたレーザが検出物体である人に当たって反射し、本体に戻るまでの時間を測定することで、検出物体までの距離を算出します(図3)。 さらに、レーザを扇状に少しずつ角度を変えながら投光して距離を算出することで、人が警告領域もしくは防護領域のどこに位置するのかを検出します。
当社のウェブサイトには、当社およびサードパーティー製のクッキーが使用されます。これらのクッキーにより、ウェブサイトのパフォーマンスを把握し関連するコンテンツやマーケティング情報の優れたエクスペリエンスを実現します。クッキー通知に記載されているクッキーの使用に同意するためにプライバシーポリシーをご覧いただき「続行」をクリックしてください。
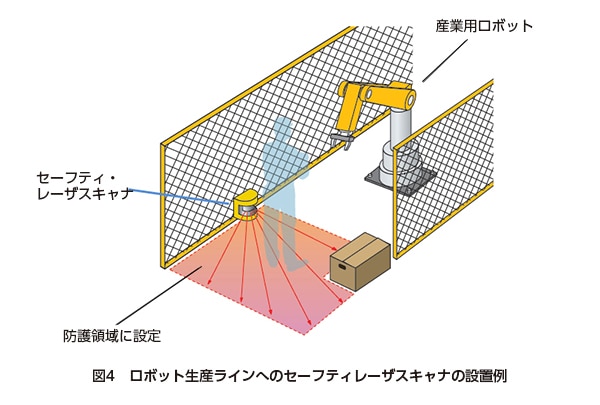
セーフティレーザスキャナ(以下、レーザスキャナと呼びます)は、主に生産現場で人が危険な機械や設備に近づいたことを検出するための安全機器です(図1)。
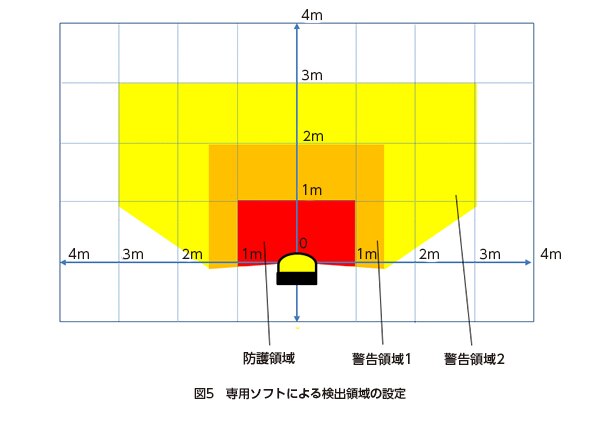
人がレーザスキャナの警告領域(図2の黄色の領域)に進入すると、警告信号によるブザー音や表示灯の点灯・点滅を通じて人に注意を促します。
さらに、警告領域内側の防護領域(進入すると危険な場所)に人が進入すると、機械の起動許可信号をオフにして、機械を停止させます。
レーザスキャナによっていったん機械を停止させると、人が防護領域内にとどまっている間は、機械の起動許可信号はオフの状態を維持します。人が防護領域の外に出ない限り、機械は再起動できません。
警告領域の設定は、ある程度自由に設定することができます。また、ある1つの警告領域に加えて複数の場所を警告領域として設定することや、警告領域を全く設けないことも可能です。