AGV/AMR開発キット
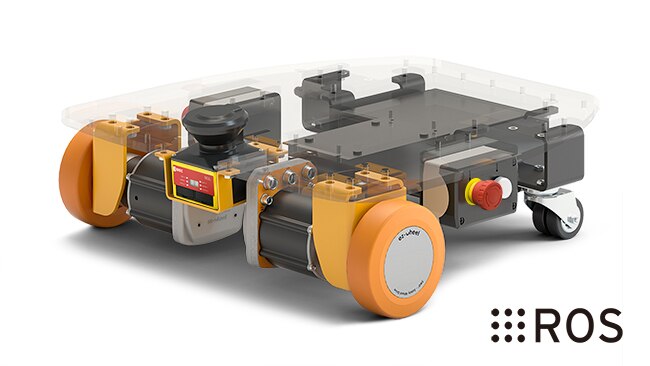
SWD Starter Kit/SWDスターターキット
・ROS開発環境でAGV/AMRを開発されるエンジニア向け
・ROSべ―スのナビゲーションソフトをお持ちであれば、すぐにAGV/AMRとしてテスト可能
SWD Coreを活用し、最小限のコンポーネンツでAMRを構成した評価用キットです。ROSのナビゲーション等をインストールし評価用にご使用いただけます。キットのままでも走行できますが、分解して評価したいアプリケーションに再構築も可能です。
SWDスターターキットのROS構成については下記のGitHubをご覧ください。
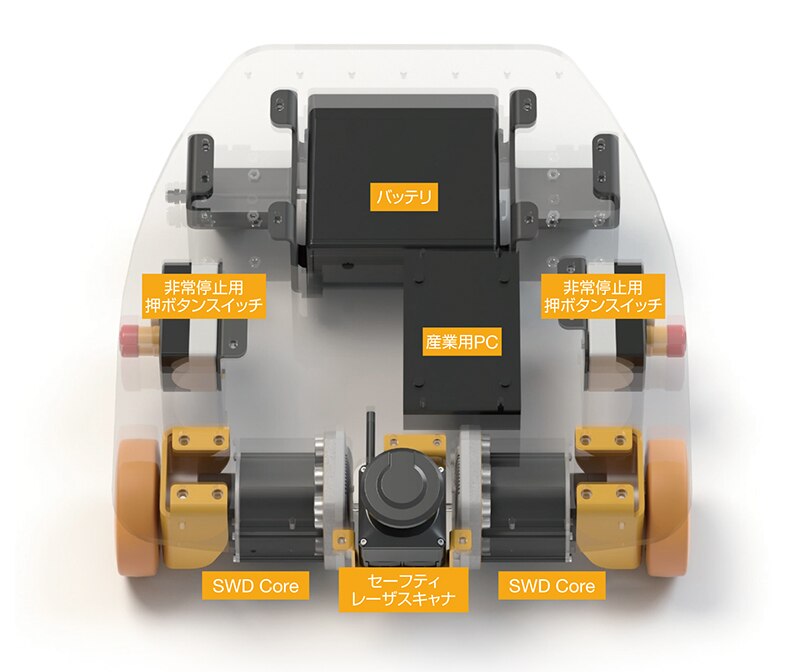
基本構成(配線込み)
| 品名 | 外観 | 個数 |
| SWD Core |  | 2個 |
| ホイール |  | 2個 |
| キャスタ |  | 2個 |
| バッテリ |  | 1個 |
| 産業用PC |  | 1個 |
| 品名 | 外観 | 個数 |
| Wi-Fi ルータ |  | 1個 |
| セーフティレーザスキャナ |  | 1個 |
| 非常停止用押ボタンスイッチ |  | 2個 |
| 押ボタンスイッチ |  | 1個 |
| 車体(アクリル) |  | 1個 |
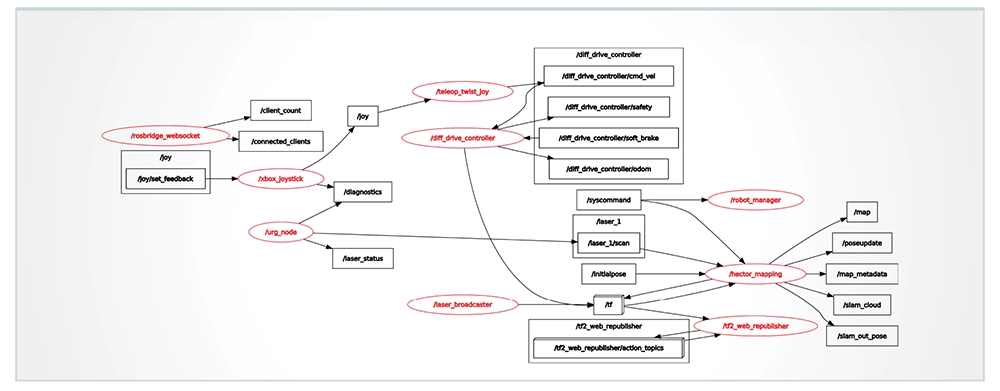
スターターキットのROSの構成
SWDスターターキット用に構成されたROSのノードグラフとインストラクションを参考にしていただくことで、開発工数の削減につながります。