当社のウェブサイトには、当社およびサードパーティー製のクッキーが使用されます。これらのクッキーにより、ウェブサイトのパフォーマンスを把握し関連するコンテンツやマーケティング情報の優れたエクスペリエンスを実現します。クッキー通知に記載されているクッキーの使用に同意するためにプライバシーポリシーをご覧いただき「続行」をクリックしてください。
- ホーム
- 複数のロボットを個体認識して制御する無線ロボット安全制御システム
IDECについて
社長メッセージ
社長メッセージ
企業情報
会社概要
会社概要
役員一覧
役員一覧
国内拠点
国内拠点
海外ネットワーク
海外ネットワーク
企業情報
IDECの歴史
沿革
ブランド
ブランド
沿革
IDECの歴史
Our Vision
Well-being
Well-being
The IDEC way
The IDEC way
Our Vision
事業紹介
HMI事業
HMI事業
インダストリアルコンポーネンツ事業
インダストリアルコンポーネンツ事業
オートメーション /センシング事業
オートメーション /センシング事業
Safety-explosion-proof
Safety-explosion-proof
New-business
New-business
procurement
procurement
事業紹介
株主・投資家情報
株主・投資家情報
テクノロジー
研究開発活動
研究開発活動
社外発表論文
社外発表論文
テクノロジー
知的財産情報
知的財産情報
ニュース
ニュース
採用情報
採用情報
- 社長メッセージ
- 社長メッセージ
- 企業情報
- 会社概要
- 会社概要
- 役員一覧
- 役員一覧
- 国内拠点
- 国内拠点
- 海外ネットワーク
- 海外ネットワーク
- 企業情報
- IDECの歴史
- 沿革
- ブランド
- ブランド
- 沿革
- IDECの歴史
- Our Vision
- Well-being
- Well-being
- The IDEC way
- The IDEC way
- Our Vision
- 事業紹介
- HMI事業
- HMI事業
- インダストリアルコンポーネンツ事業
- インダストリアルコンポーネンツ事業
- オートメーション /センシング事業
- オートメーション /センシング事業
- Safety-explosion-proof
- Safety-explosion-proof
- New-business
- New-business
- procurement
- procurement
- 事業紹介
- 株主・投資家情報
- 株主・投資家情報
- テクノロジー
- 研究開発活動
- 研究開発活動
- 社外発表論文
- 社外発表論文
- テクノロジー
- 知的財産情報
- 知的財産情報
- ニュース
- ニュース
- 採用情報
- 採用情報
登録番号: 特許第5311657号
発明の背景
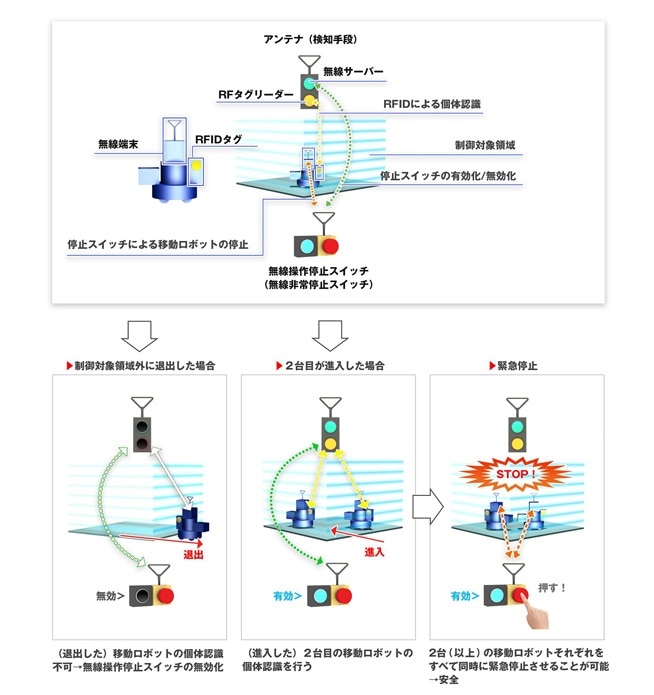
産業用ロボット等の固定ロボットは、作業員の安全確保のための非常停止スイッチとは有線で接続されるため、この有線接続されたスイッチのおかげで非常時には必ず緊急停止させることができます。しかし、無人搬送ロボット等の移動ロボットの場合、有線での接続は実用的ではないため、非常時は無線接続での非常停止スイッチによって緊急停止させることになります。
これまでの移動ロボットの無線操作器停止スイッチでは特定の1体のみしか制御できないため、別の構内に移動するなどして制御下から外れてしまうと緊急停止させることができなくなり、危険なものでした。
このような背景から、無線接続でも緊急停止させることができるロボットの安全制御システムが求められていました。
発明の概要
この発明の無線ロボット安全制御システムでは、付与したIDによって移動ロボットそれぞれを個体認識して制御できるので、無線操作器停止スイッチと移動ロボットとの組み合わせを気にすることなく、いずれの移動ロボットも緊急停止することができます。
たとえば、工場内の複数個所に移動ロボット制御用の無線操作器停止スイッチを設置すると、移動ロボットはいずれかの無線操作器停止スイッチの検知範囲内において識別されている状態となるため、その無線操作器停止スイッチにより識別下の移動ロボットを緊急停止させることができます。
また、2体以上のロボットを1つの無線操作器停止スイッチにより同時に識別して制御することもできるため、同じ構内で移動している2体以上のロボットそれぞれをすべて同時に緊急停止させることもできます。
※現在、無線による非常停止機能の技術開発が始まっており、本特許はそのアプリケーション特許の一例です。
発明の効果
このように、この無線ロボット安全制御システムは、無線により複数個所の複数のロボットの安全制御が行えることから、工場内のいずれの作業員の安全をも確保することが可能です。