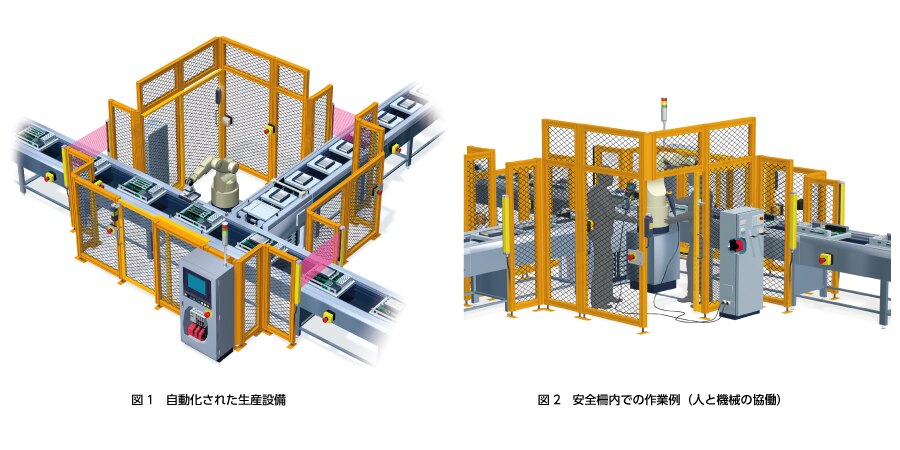
図1のような高度に自動化された生産設備は、人が介在する必要がないように見えます。
しかし、図2に示すように、設備の立ち上げ時/変更時/ロボットのティーチング作業時などは、人が安全柵の中(危険区域)に入り、ロボットアームをはじめとする可動部の近くで手動運転を行うなど、通常運転時よりリスクの高い作業が多数あります。そうした状況において安全を確保するために有効なのが、3ポジションイネーブルスイッチ (以下、「イネーブルスイッチ」と表記)です。
イネーブルスイッチは、ロボットのティーチングペンダントなどの携帯型操作機器に組み込まれ、人が意思を持ってイネーブルスイッチを操作することで機械の手動運転を許可します。また、人に危険が迫った場合、とっさの反射反応により運転許可を取り消すことで機械を停止させるための安全機器です。
イネーブルスイッチの動作と使用方法
代表的なイネーブルスイッチを図3に、イネーブルスイッチが組み込まれたイネーブル装置の例を図4に示します。
一般的なスイッチのボタン操作がオン/オフの2段階であるのに対し、イネーブルスイッチではボタン操作がオフ/オン/オフの3段階あります。図5に、ボタン操作の各段階と接点のオン/オフ状態を示します。
ポジション1はボタンを操作してない状態です。接点はオフのため、機械の手動運転は許可されていません。
ポジション2はボタンを軽く押し込んだ状態です。接点がオンになり、機械の手動運転が許可されます。ロボットのティーチング作業などはこの状態でのみ行えます。なお、ポジション2の状態から手を放した場合、ボタンがポジション1に戻って接点はオフになり、機械の手動運転許可の取り消しにより機械は停止します。
ポジション3はポジション2からさらにボタンを押し込んだ状態です。接点はオフになり、機械の手動運転許可の取り消しにより機械は停止します。また、一度ポジション3に押し込んだ状態からポジション1に戻る時は、接点はオフのままポジション1に戻ります。
ポジション3が設けられている理由
手動運転のことだけを考えれば、ポジション1と2だけで十分のように思えます。それでは、なぜポジション3が設けられているのでしょうか?それは、人の反射動作を考慮しているからです。予期せぬ危険な事態に遭遇した場合、人は手を放す、もしくは手を握り込むという反射動作を行うからです。
手動運転を行う場合、作業者が意図を持ってポジション2でボタンを保持している間は手動運転が許可され、ティーチング作業などを行います。この作業中、操作ミスやノイズなどによりロボットや機械が予期せぬ動作をすると作業者が危険にさらされます。この時、予期せぬ動作に驚いた作業者は反射的にティーチングペンダントを放り出すか、もしくは反射的にティーチングペンダントを持つ手を強く握り込みます。
しかし、驚いた作業者の反射反応のため、手を放すもしくは手を握り込む、どちらの反射動作を行うかはあらかじめ決められるものではありませんし、その時になってみないと分かりません。そのため、手を放した場合だけでなく、手を強く握り込んだ場合でも機械を停止できるようにポジション3が設けられています。
故障の検出
イネーブルスイッチは主として扉のインターロックが解除され、安全柵の中で人と機械が協働作業を行う環境下でのリスク低減が可能な機器です。そのため、イネーブルスイッチを用いた安全システムには、扉のインターロック装置と同様に高い安全性能が求められます。
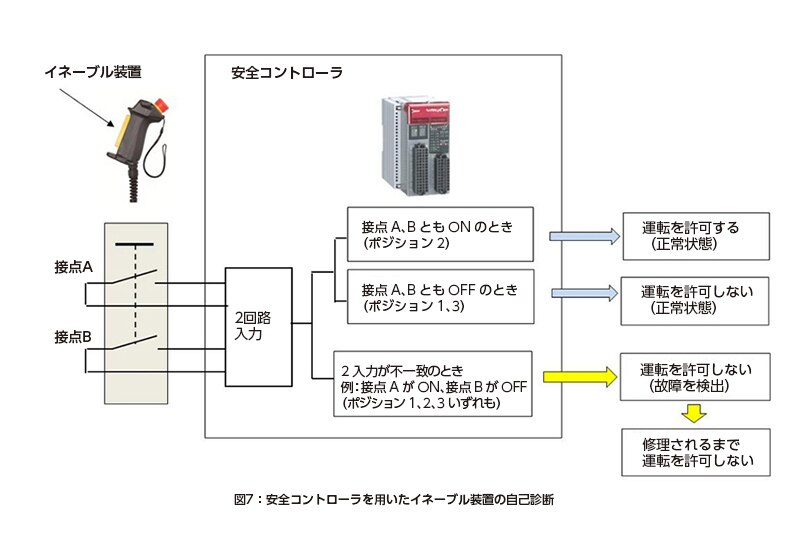
例えば、産業用ロボットやそれを用いたロボットシステムで活用されるイネーブルスイッチを用いた安全システムでは、カテゴリ3, PL=dを満足させることが規格上必要です。そこで、イネーブルスイッチの接点を2重化し、安全コントローラと組み合わせてシステムを構築することで、イネーブルスイッチの接点故障による危険状態の発生を防ぎ、高い安全性能を実現することができます。(図7)。
なお、カテゴリ、PLについての解説は、以下のリンク先にてご確認ください。
3ポジションイネーブルスイッチの適用例
ここまでに示してきたように、イネーブルスイッチは人と機械が協働する場合において、危険に遭遇して驚いた作業者の手を放すもしくは手を握り込むという反射反応を利用して機械を停止させることでリスクを低減する方策です。主にロボットのティーチング用ペンダントに搭載され、人がロボットの近くでティーチングを行う時の安全性を確保してきました。
しかし、驚いた作業者の手を放すもしくは手を握り込むという反射反応がリスク低減に寄与するのは、ロボットに限った話ではありません。機械を停止させることが安全につながる用途であれば、イネーブルスイッチがリスク低減に役立つ可能性が大いにあります。
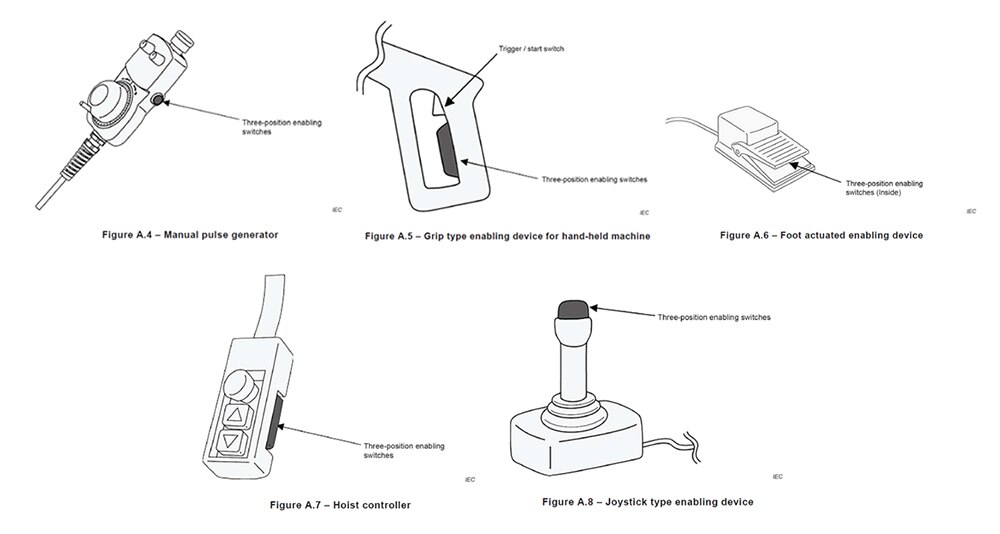
そのことを反映して、最新のIEC60947-5-8:2020低圧開閉装置及び制御装置-第5-8部:制御回路機器及び開閉素子-3ポジションイネーブルスイッチ においては、以下に示す様々な適用例が追加されています。(以下の図はIEC60947-5-8:2020より引用)
以下に示されるA1~A3は、これまで主にイネーブルスイッチが使用されてきたロボット分野におけるティーチングペンダントやグリップスイッチへの適用例です。
以下に示されるA.4~A.8が、新たに追加された適用例です。
これらの用途への適用可能なイネーブルスイッチについては、こちらのページでご確認ください。
Enabling Switch Product Descriptions